Рис. 10. Графическое построение элементов рулевого управлении автомобилем.
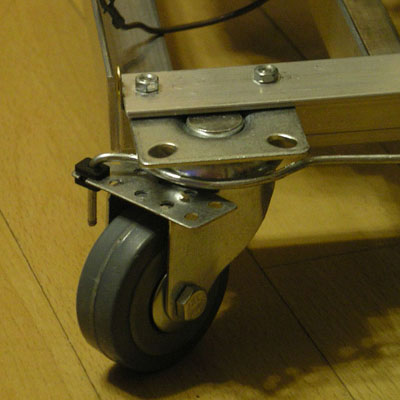
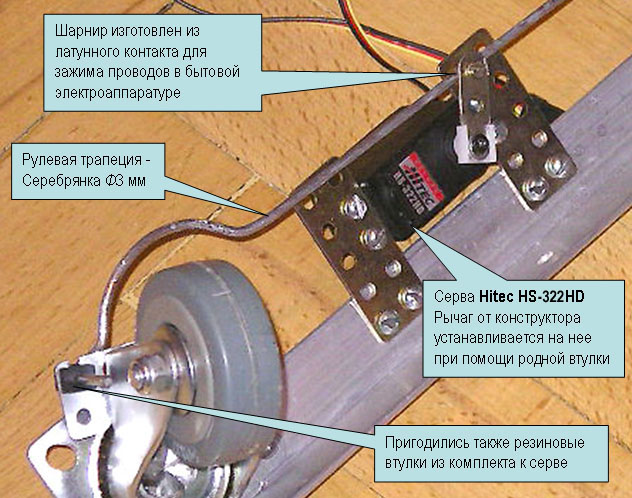
Рулевая трапеция и сервопривод
Выбранная трехколесная конструкция с задними поворотными колесами обнаружила сразу некоторые сложности с управлением и поворотом.Поиски теоретических основ привели к статье в Журнале Моделист-Конструктор №6 за 1979 год: Петров Е. ФОРМУЛА "GT", МАСШТАБ 1:8
Приведу цитату и исправленный мною рисунок:
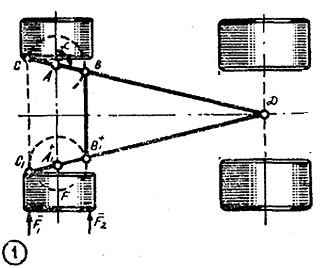
"При повороте внешнее колесо (по отношению к центру окружности, по которой движется автомобиль) проходит большее расстояние, так как движется по окружности большего радиуса, а главное - меньшей кривизны. Следовательно, угол его поворота должен быть меньшим. Это достигается путем выбора геометрии поворотного узла переднего моста. Существует простой, но дающий очень хорошие результаты метод расчета этих величин: строим элементы рулевого управления (рис. 10(1)), точно соблюдая масштаб деталей. Сначала показывается положение осей вращения передних и задних колес (расстояние между ними соответствует колесной базе), затем на чертеже отмечается положение осей шкворней (точки А и А1). Соединяя прямыми линиями точки пересечения осей шкворней передних колес с точкой D, находящейся на середине оси задних колес (pablos: В оригинальной статье ошибка в рисунке) , получаем линии СD и С1D. На них и должны лежать центры В и B1 шарниров поворотных рычагов.
Рис. 10. Графическое построение элементов рулевого управлении автомобилем.
Угол α и есть установочный угол поворотного рычага. При выборе точек А и А1 следует помнить, что радиус обката колеса А1F должен быть выбран как можно меньшим, так как это значительно уменьшает необходимый вращающий момент, требуемый для поворота передних колес. В лучшем варианте точки А и А1 располагают внутри колеса (ближе к точке F). Однако это связано с техническими трудностями при изготовлении передней подвески. Следовательно, сначала необходимо детально продумать и нарисовать отдельные детали поворотного механизма и колеса модели. Когда модель будет уже построена, легко проверить правильность выбора положений осей шкворней - сервомеханизм должен без явного напряжения поворачивать передние колеса полностью укомплектованной, неподвижно стоящей модели. Механизм надо регулировать на гладкой полированной поверхности (стекло, крышка стола), тогда на асфальте и при движении при повороте колес нагрузки распределятся равномерно. Это ускорит маневр.
На рисунке 10 (1) линиями ВВ1 и СС1 показаны возможные положения поперечной тяги переднего моста. Тяга по схеме ВB1 работает на сжатие, следовательно, ее нужно делать большего диаметра, чем тягу по схеме СС1, которая работает на растяжение."
Распространив теорию на наш случай, получим следующую схему для нахождения точек С и С1. Естественно, что схему нужно построить в масштабе или в натуральную величину.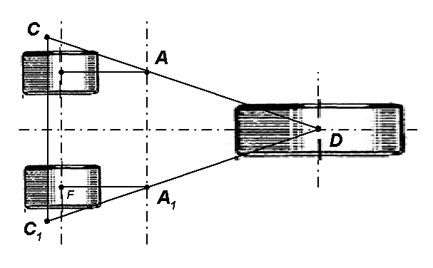
Пластину крепления поперечной тяги сначала приклеил, затем зафиксировал болтом.